Drones

Motores Brushless
Bueno, en este articulo vamos a enseñar como funciona un motor Brushless (Sin
escobillas).

Vamos a empezar por lo más básico, trabajamos en corriente continua, por lo tanto: ¿Cómo funciona un motor eléctrico de corriente continua? Un motor
eléctrico sencillo de corriente continua se mueve debido a que existe un campo electromagnético que atrae el lado opuesto del rotor hasta que llega a una determinada posición donde unas
escobillas (1 y 2) en contacto con el positivo y tierra cambian la polaridad para que de nuevo sea atraído el lado opuesto del rotor y así crear un movimiento continuo.
Problema de las escobillas:
Por lo tanto, para un proyecto como el nuestro donde necesitamos motores pequeños, vamos a tener que eliminar las escobillas.
Existen comercialmente motores sin escobillas, no dejan de ser maquinas eléctricas normales pero, ¿Que ocurre con las máquinas eléctricas? Que funcionan
con corriente alterna y nuestra batería entrega corriente continua. Vamos a tener que conseguir corriente alterna para que funcionen estos motores (Lo ideal es que fuera sinusoidal, aunque
en la practica se utilizarán PWM (Pulsos de Anchura Modulada)). Aquí es donde entran en juego los variadores o ESC's. Nota: Suele utilizarse trifásica para este tipo de
motores.

Estos motores sin escobillas permiten que consigamos un gran rendimiento y una gran potencia a cambio de un gran consumo. Debido a esto,
tenemos que utilizar baterías Lypo (Polímero de litio), son baterías con poca densidad de energía
en comparación con otras pero con una característica única, pueden entregar muchísima potencia ya que los motores brushless necesitan del orden de 10 A a 11 v.
Kv, la característica básica de un motor brushless:
Esta constante (Es casi una constante) significa simplemente la cantidad de vueltas (RPM) que da el motor por cada voltio de continua aplicado al ESC (A máxima
potencia). Es decir que si a un motor de 1100 Kv le aplicamos 11,1v funcionará a 12210 RPM como máximo (Con
el ESC se puede disminuir). Esta es su velocidad nominal y nunca subirá más velocidad a no ser que aumentemos la diferencia de potencial (Voltaje).
¿Dónde se compran los motores brushless?
Se compran en tiendas de RC como, por ejemplo www.hobbyking.com (Página donde hemos hecho el pedido)
Ventajas:
- Mayor eficiencia (menos perdida por calor)
- Mayor rendimiento (mayor duración de las baterías para la misma potencia)
- Menor peso para la misma potencia
- Requieren menos mantenimiento al no tener escobillas
- Relación velocidad/par motor es casi una constante
- Mayor potencia para el mismo tamaño
- Mejor disipación de calor
- Rango de velocidad elevado al no tener limitación mecánica.
- Menor ruido electrónico (menos interferencias en otros circuitos)
Desventajas:
- Mayor costo de construcción
- El control es mediante un circuito caro y complejo
- Siempre hace falta un control electrónico para que funcione (ESC's), que a veces duplica el costo
Tomado de http://www.quadruino.com/guia-2/materiales-necesarios-1/motores-brushless

Circuitos Reguladores de Velocidad (ESC)
Los reguladores de velocidad son los encargados de hacer andar el motor, en el caso de radiocontrol, lo que hacen es medir el tiempo de 1ms a 2ms como un servo estandard y transformarlo en un
maximo y minimo de RPMs para el motor.

Tienen basicamente dos formas de operar, puede ser seteado a una cierta cantidad de vueltas, supongamos 7000 RPMs, para la cual deberia entregar cierta corriente programada. Si la carga aumenta,
como podria ser el caso de un rotor de helicoptero, entonces el regulador, deberia entregar mas corriente para que se mantengan esas 7000 RPMs. El regulador controla la forma del pulso
contraelectromotriz (EMF) y asi ajusta la corriente de salida.
La otra forma, la cual es la mas comun y que usa la mayoria es que el motor inyecta un cierto valor de corriente y luego mide cual es la velocidad del motor al medir el EMF. De esta forma se auto
ajusta.

ESC's
Las primeras preguntas que surgen son: ¿Que es un ESC? ¿Para qué sirve? Un ESC (Electronic Speed Controller) es un dispositivo electrónico que
sirve para controlar la velocidad del motor brushless.
Lo primero que debemos conocer de los ESC son sus conectores:

A la izquierda:
- Cable rojo y negro: Alimentación del motor, va conectado a la batería lypo.
- Conector de 3 pins (igual que los servos):
-
- Amarillo: Señal PWM 50Hz desde el Arduino.
- Rojo y negro: Alimentación del ESC
A la derecha:
- 3 cables de trifásica para la alimentación del motor brushless.
El variador o ESC recibirá la señal PWM de 50 Hz y dependiendo de la longitud del ancho de pulso entregará más o menos potencia al motor.
La longitud del pulso PWM varía de 1 ms a 1.5 ms, parado y a máxima potencia respectivamente.
NOTA IMPORTANTE: Las longitudes de estado lógico alto varían en función del fabricante y el modelo, por lo tanto puede ser que para otro fabricante diferente a
HobbyKing sean diferentes (Son los ESC con los que trabajamos actualmente). Normalmente son: 1-1.5 ms, 1-2 ms, 1-2.5 ms.
Por ejemplo, si mandamos una señal PWM 50 Hz desde el Arduino al ESC HobbyKing con un ancho de pulso de 1.25 ms, el motor funcionará a la mitad de potencia
aproximadamente.
Vamos a responder a algunas de las preguntas mas comunes:
¿Cuánto tiempo estaría la señal en estado bajo?
La señal estaría en estado lógico alto de 1 ms a 1.5 ms y luego, el resto del tiempo hasta 20 ms (1/50 s) en estado lógico bajo.
¿Por qué el pulso mínimo es 1 ms y no 0 ms?
Para evitar errores en la transmisión, por ejemplo interferencias.
¿Problemas de los ESC convencionales controlados por PWM 50 Hz?
Suelen estar hechos para los receptores RC usuales que mandan señales PWM 50 Hz. En la mayoría de aplicaciones no es necesaria más frecuencia de refresco pero
para nuestro caso es posible que necesitemos mayor frecuencia de refresco debido a que nuestro Quadruino necesita máxima estabilidad para quedarse estacionario en el aire y responder
correctamente a las posibles adversidades que el aire conlleva.
¿Pero... los ESC dentro que tienen?
Los ESC tienen un circuito electrónico controlado por un microcontrolador (Normalmente un Atmel de tipo AVG).
¿Y no podría tener mayor frecuencia de refresco ese microcontrolador?
Por supuesto, pero se comercializan para ser utilizados en RC's por lo que no se fabrican para tener mayor frecuencia de refresco sino para responder
correctamente a los receptores RC.
¿Existen ESC comerciales con más frecuencia de refresco?
Normalmente no se comercializan ya que el standard es el PWM 50Hz.
¿Existen ESC programables?
Existen, de hecho, la mayoría de los ESC son programables (Algunos mediante comunicación serie y otros con una tarjeta programadora diseñada por el fabricante).
A algunos se les puede cambiar la frecuencia de refresco, además de otras características.
¿Existen ESC con otro tipo de comunicación de control?
Algunos se comunican con el protocolo I2C alcanzando altas tasas de refresco, pero tienen el gran problema de que son muy caros ya que su aplicación es
prácticamente la construcción de multicopters. Un ejemplo son los Driver de la empresa alemana Mikrokopter.
¿Y... no se podrían modificar unos ESC con control por PWM para funcionar con I2C (Los microcontroladores suelen llevar esta opción de
comunicación)?
Si, existen muchos mods para diferentes ESC comerciales aunque suelen ser procesos complejos donde se invierte mucho tiempo para el dinero que se ahorra
(Ahorramos unos 40 € por ESC) aunque es una opción que aun no hemos descartado. Comentaremos algunos de estos en próximas publicaciones.
para finalizar, he de decir que hemos comprado unos ESC de HobbyKing a 25 A. Esto quiere decir que si pasan mas de 25 A corre el riesgo de quemarse el
dispositivo. Como el brushless necesita hasta 14 A máximo vamos sobrados.
Tomado de http://www.quadruino.com/guia-2/materiales-necesarios-1/esc
El KK2.1.5

     
|
La próxima evolución de la revolución del rotor está aquí !! El KK2.1.5 está empacando nuevo poder encontrado con sensores actualizados, memoria y pasadores de cabecera.
El KK2.1.5 es próxima gran evolución de los tableros de control de vuelo primera generación KK. El KK2.1.5 fue diseñado desde el principio para que el vuelo multi-rotor para todos, no sólo los expertos. La pantalla LCD y construido en el software hace que la instalación y configuración más fácil que nunca. Una gran cantidad de multi-rotor tipos de artesanía son pre-instalado, sólo tiene que seleccionar el tipo de embarcación, comprobar la dirección de diseño de motor / hélice, calibrar su ESC s y la radio y ya está listo para ir! Todo lo cual se hace con fácil seguir instrucciones en pantalla!
El sistema original giroscopio KK ha sido actualizado a un sistema increíblemente sensible 6050 MPU toma esta la junta KK más estable nunca y que permite la adición de una función de nivel automático. En el corazón de la KK2.1.5 es un microcontrolador de 8 bits RISC AVR Atmel Mega644PA con 64k de memoria. Una cabecera de polaridad protegida adicional se ha añadido para la detección de tensión, por lo que no hay necesidad de soldadura a bordo. Un zumbador piezoeléctrico práctica también se incluye para la alerta de audio cuando la activación y desactivación de la junta.
El KK2.1.5 agregó protección de polaridad a la cabecera de detección de voltaje y un fusible protegido salidas zumbador, en caso de que algo está conectado accidentalmente en forma incorrecta. La línea de detección de tensión se ha actualizado para una mayor precisión. El tablero está claramente etiquetado y la tensión de color de línea sentido se ha cambiado a rojo para facilitar su identificación, por lo que la instalación y las conexiones en un instante.
Si eres nuevo en el vuelo multi-rotor o haber sido inseguro sobre cómo configurar un tablero de KK entonces el KK2.1.5 fue construido para usted. La interfaz de programación de 6 pines USBasp AVR garantiza futuras actualizaciones de software será rápido y fácil.
Especificaciones:
Tamaño: 50.5mm x 50.5mm x 12mm
Peso: 21 gramos (Inc piezo buzzer)
IC: Atmega644 PA
Gyro / Acc: 6050MPU InvenSense Inc.
De nivel automático: Sí
Voltaje de entrada: 4.8-6.0V
Interfaz de AVR: estándar de 6 pines.
Señal del receptor: 1520us (5 canales)
Señal ESC: 1520us
Firmware Versión: 1.6:
Firmware pre-instalado.
Dualcopter
Tricopter
Y6
Quadcopter +
Quadcopter X
Hexcopter +
Hexcopter X
Octocopter +
Octocopter X
X8 +
X8 X
H8
H6
V8
V6
Singlecopter 2M 2S
Singlecopter 1M 4S
(Mezcla personalizada a través de la "Editor Mixer" opción)
El Editor Mixer permite ajustar dónde y cuánto señal de los motores reciben de entrada de palo y sensores. Esto le permite crear
cualquier configuración posible con hasta 8 motores o servos.
¿Qué es una tarjeta de Multi-Rotor de control que usted pide?
El controlador HobbyKing KK2.1.5 Multi-Rotor es un tablero de control de vuelo para los aviones multi-rotor (Tricopters, Quadcopters, Hexcopters etc). Su objetivo es estabilizar la aeronave durante el vuelo. Para ello se necesita la señal de la 6050MPU giroscopio / acc (balance, cabeceo y guiñada) y luego pasa la señal a la Atmega644PA IC. La unidad Atmega644PA IC procesa estas señales según el usuarios firmware seleccionado y pasa señales de control a los controladores electrónicos de velocidad instalados (ESC s). Estas señales instruyen para hacer ajustes finos del CES s a la velocidad de giro de motores que a su vez estabiliza su arte multi-rotor.
El tablero de control HobbyKing KK2.1.5 Multi-Rotor también utiliza señales de su receptor sistemas de radio (Rx) y pasa estas señales al Atmega644PA IC través de las entradas de alerones, elevador, acelerador y timón. Una vez que esta información ha sido procesado el IC enviará variando señales al ESC s que a su vez ajustar la velocidad de rotación de cada motor para inducir vuelo controlado (arriba, abajo, hacia atrás, hacia delante, izquierda, derecha, guiñada).
Tomado de
http://www.hobbyking.com/hobbyking/store/__54299__Hobbyking_KK2_1_5_Multi_rotor_LCD_Flight_Control_Board_With_6050MPU_And_Atmel_644PA.html
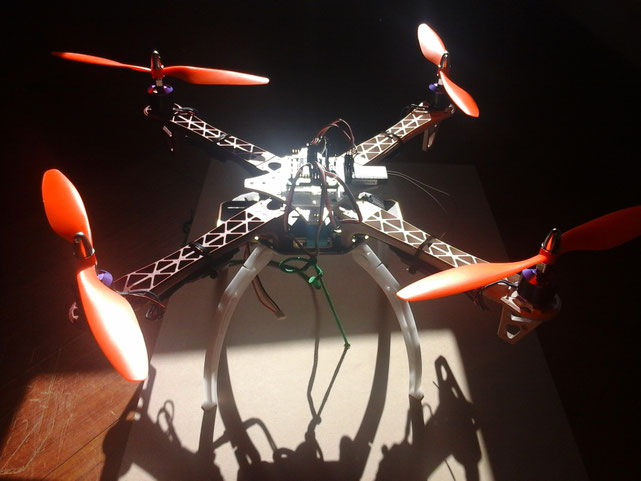
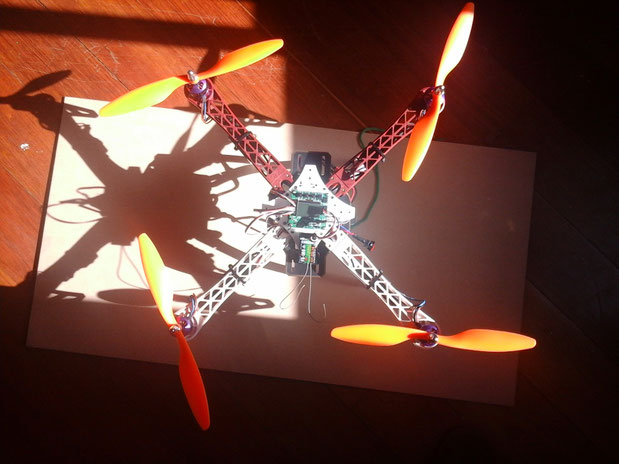
F450 hj450 DJI quadricóptero


Hexacoptero Telemetria

VIDEO Hexacoptero
FPV Freerider
RC quadcopter racing simulator.
http://fpv-freerider.itch.io/fpv-freerider