MOTO REDUCTOR
Lo primero que debemos determinar en la construcción de un robot de competición son los motores con los cuales se determinaran potencia y velocidad del robot.
Para robótica hay en el mercado diferentes tipos de moto reductores los cuales tienen diferentes características y prestan ventajas como desventajas a la hora de estar compitiendo.
El voltaje como la corriente determinara batería a usar en nuestro robot. Para robótica pololu es un buen referente ya que proporciona una buena variedad de motor reductor con ciertas características.
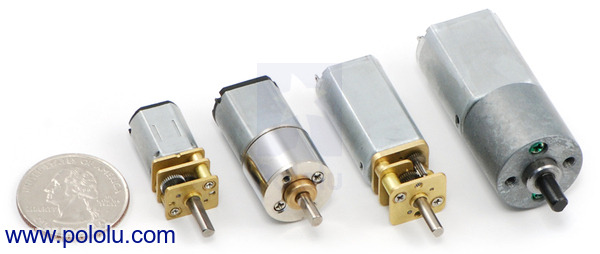
Micro metal Motorreductores

Con una sección transversal que mide sólo 10 × 12 mm (0,39 "× 0,47"), estas pequeñas motorreductores DC peinado están disponibles en una amplia gama de relaciones de engranajes, desde 5: 1 hasta 1000: 1 y ofrecen una elección entre tres diferentes Motores: de alta potencia (HP), de potencia media (MP) y estándar. Algunas versiones también están disponibles con un eje del motor opcional.
25D Motorreductores mm

Estos (0.98 ") motorreductores 25 mm de diámetro, que abarcan una amplia gama de relaciones de transmisión de 4,4: 1 a 499: 1, ofrecen una buena combinación de potencia y tamaño compacto. Tenemos versiones de alta y baja corriente para elegir, y 48 codificadores de RCP integrados están disponibles con relaciones de transmisión seleccionados.
20D Motorreductores mm

Estos 20 mm de diámetro (0,79 -diámetro ") motorreductores ofrecen una gran cantidad de energía para su tamaño. La están disponibles en varias relaciones de transmisión diferentes, desde 29: 1 a 154: 1.
37D Motorreductores mm

Medir 37 mm (1,46 ") de diámetro, estos 12 V motores son los motorreductores más grandes y poderosas que llevamos. Están disponibles en una gama de relaciones de transmisión de 19: 1 a 131: 1. Un 64 CPR codificador integrado es una opción para todos estos motores.
Mas Informacion de motores en http://etonm.com/en_index.asp
Servomotor trucado
|
|
|
|
Internamente un servomotor está formado por los siguiente elementos:
1) En primer lugar, retiramos los tornillos de la parte trasera del servo y vemos el circuito regulador y el motor. Cortamos los cables que unen el circuito y el motor y en la otra cara de la plaquita, está soldado el potenciómetro. El potenciómetro está atornillado a la carcasa, esto yo no lo sabía así que para retirar el circuito regulador, hice palanca… partiendo en 2 partes el potenciómetro como vemos en la siguiente imagen.
Esto demuestra la baja calidad del producto pero a su vez, es una ventaja para nosotros, ya que mantenemos el eje del potenciómetro.

Abrimos el servo y retiramos el circuito
2) Una vez retirado el circuito, vemos que el potenciómetro tiene 2 salientes que limitan el giro, por lo que hay que deshacerse de ellas. En la imagen siguiente vemos los salientes con un circulo rojo, debemos cortarlas o levantarlas para que no choquen con la mueca (Cuadrado azul) y así lograr que gire 360º sin problemas. No olvidemos que el eje del potenciómetro está unido al engranaje principal.

Cortar las muecas del potenciómetro ysoldar los cables al motor
Una vez conseguido que el potenciómetro gire 360º, vemos en la imagen anterior que podemos reutilizar el cable del servomotor. Yo he quitado el cable blanco (El cable de señal) y el cable rojo y negro lo soldamos al motor de corriente continua sin importar la polaridad y opcionalmente añadiendo un condensador de filtro para evitar el ruido.
3) Soldados los cables, cerramos la parte trasera del servo y abrimos la parte delantera, veremos los engranajes que forman la caja reductora. Este paso es el último, pero no por ello menos importante: El engranaje principal contiene un saliente que limita el giro. Debemos eliminarlo cortándolo o limándolo con cuidado de no dañar los dientes y tratando de que quede lo más uniforme posible para evitar rozes. Vemos dicho saliente en la siguiente imagen con un círculo rojo.

Limamos el saliente que limita el giro
Una vez terminado colocamos cuidadosamente todos los engranajes y si todo ha ido correctamente, tenemos un servomotor trucado para girar 360º. Este sistema tiene la desventaja de que necesitaremos una etapa de potencia para hacer girar bien el servo, como puede ser el circuito integrado L293 o un puente en H.
En otro post explicaré como utilizar el integrado L293 con Arduino, aunque al que le haga falta, en este vídeo está muy bien explicado: Funcionamiento y conexión de L293

|
| Servomotor Futaba S3003 |
 |
|
Servomotor Hitec HS-311 |
Tomado de el siguiente link